
Our Mice
部員の作ったロボットの紹介です。 ただいま準備中
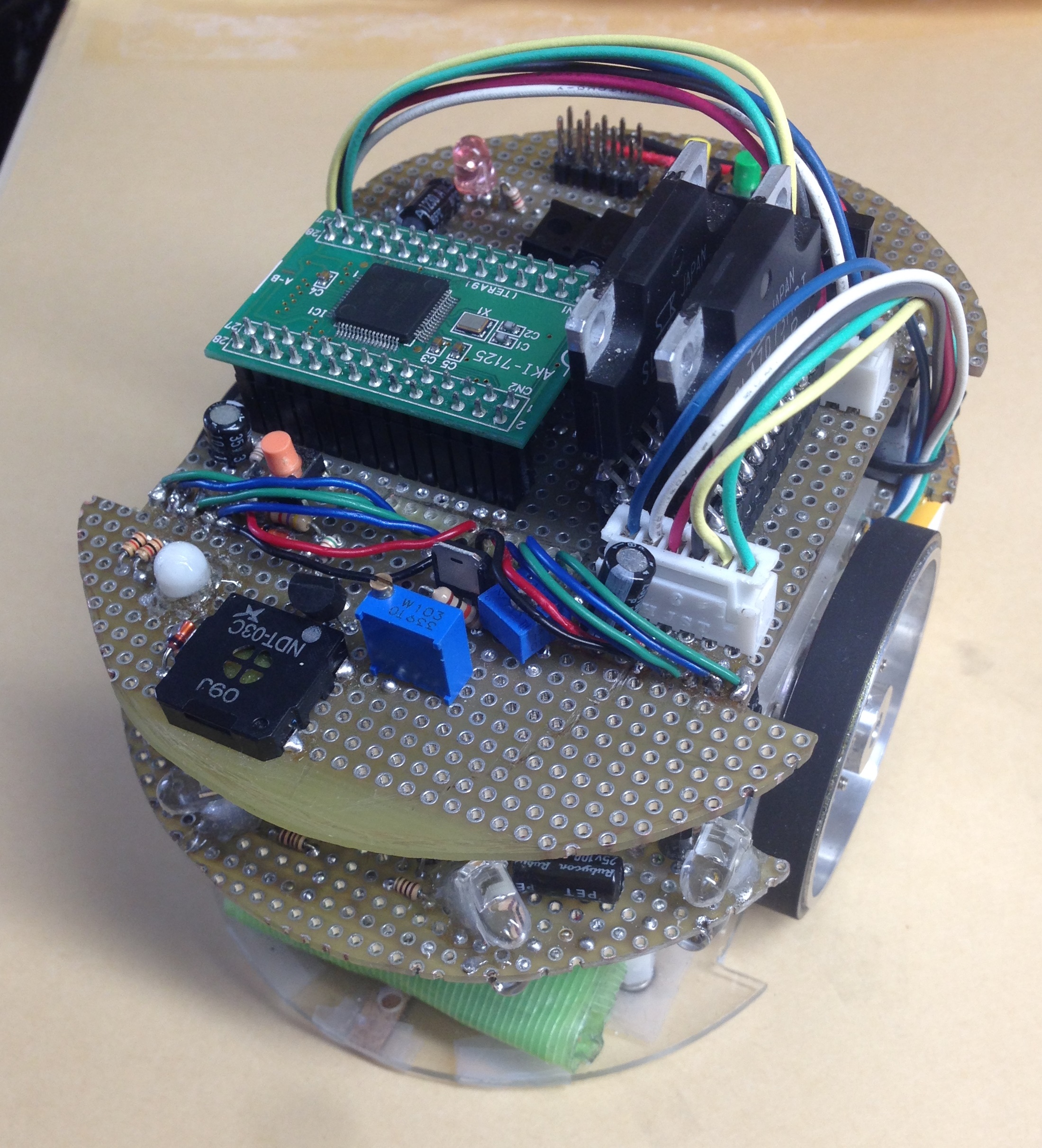
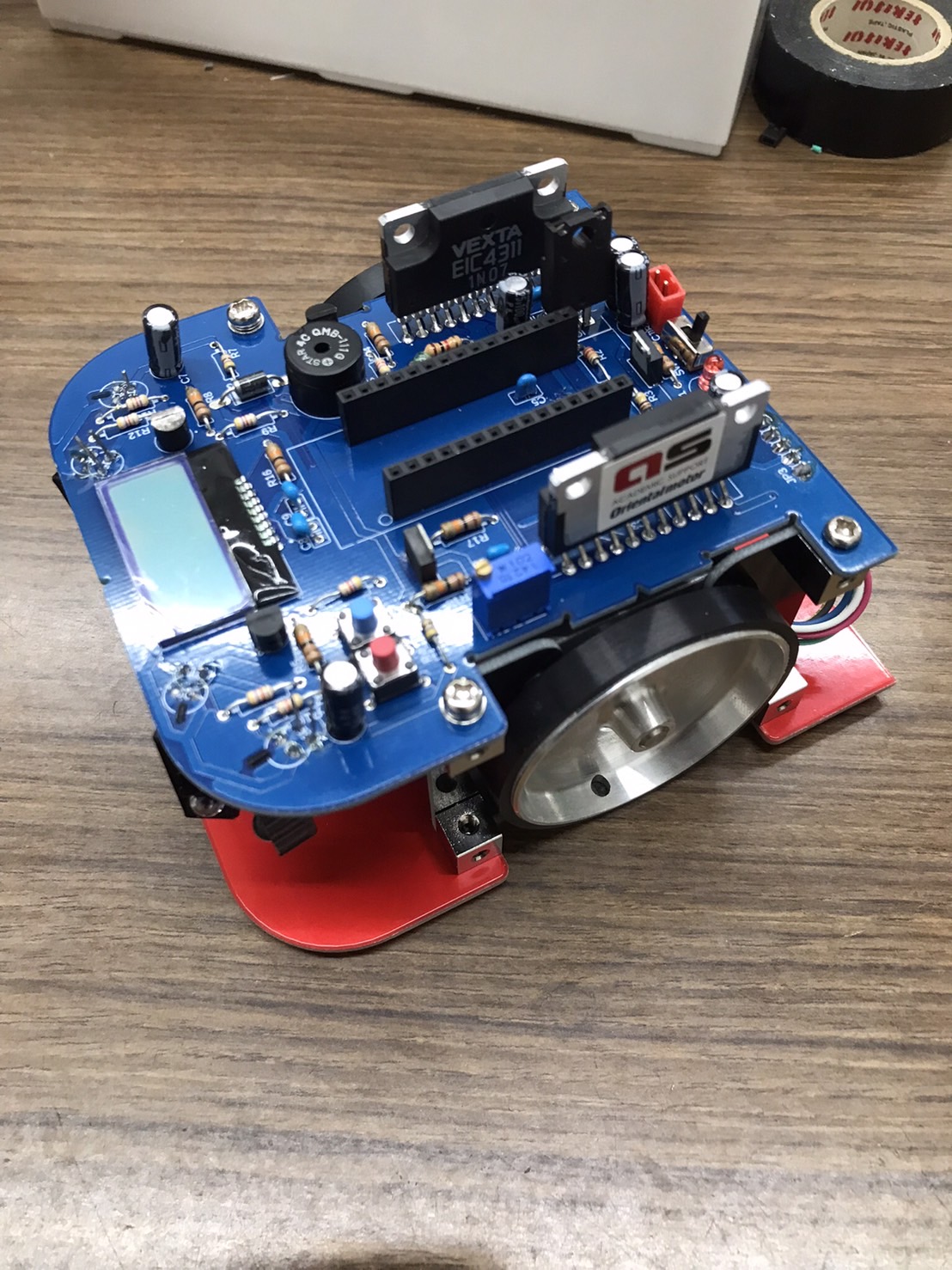
クラシックステッパーマウス
Schwarmer
| 機体名 | Schwarmer |
|---|---|
| 製作期間 | 6ヶ月 |
| 使用マイコン | SH7125(秋月基板) |
| 電源 | Lipo 3Cell 2個(直列) |
| 特徴 |
人生初製作のマイクロマウスです。 3CellのLipoを2個直列にした高電圧仕様にしました。 このせいで電流流しすぎてステッピングモータ2個燃やしてしまいました。 紹介写真にはありませんが、前後にLipoをおけるようになっていて、比較的重いLipoによって重心が機体の中心から離れず、また高くならないように工夫しています。 また、基板を前後に分けているのも重心を低くするための工夫です。 |
戦績
- 2014年 東北大会 クラシック フレッシュマン 第1位 00:08:409
- 2014年 学生大会 クラシック 第7位 00:11:521
- 2014年 全日本大会 クラシック フレッシュマンクラス 決勝 第1位 00:07:967
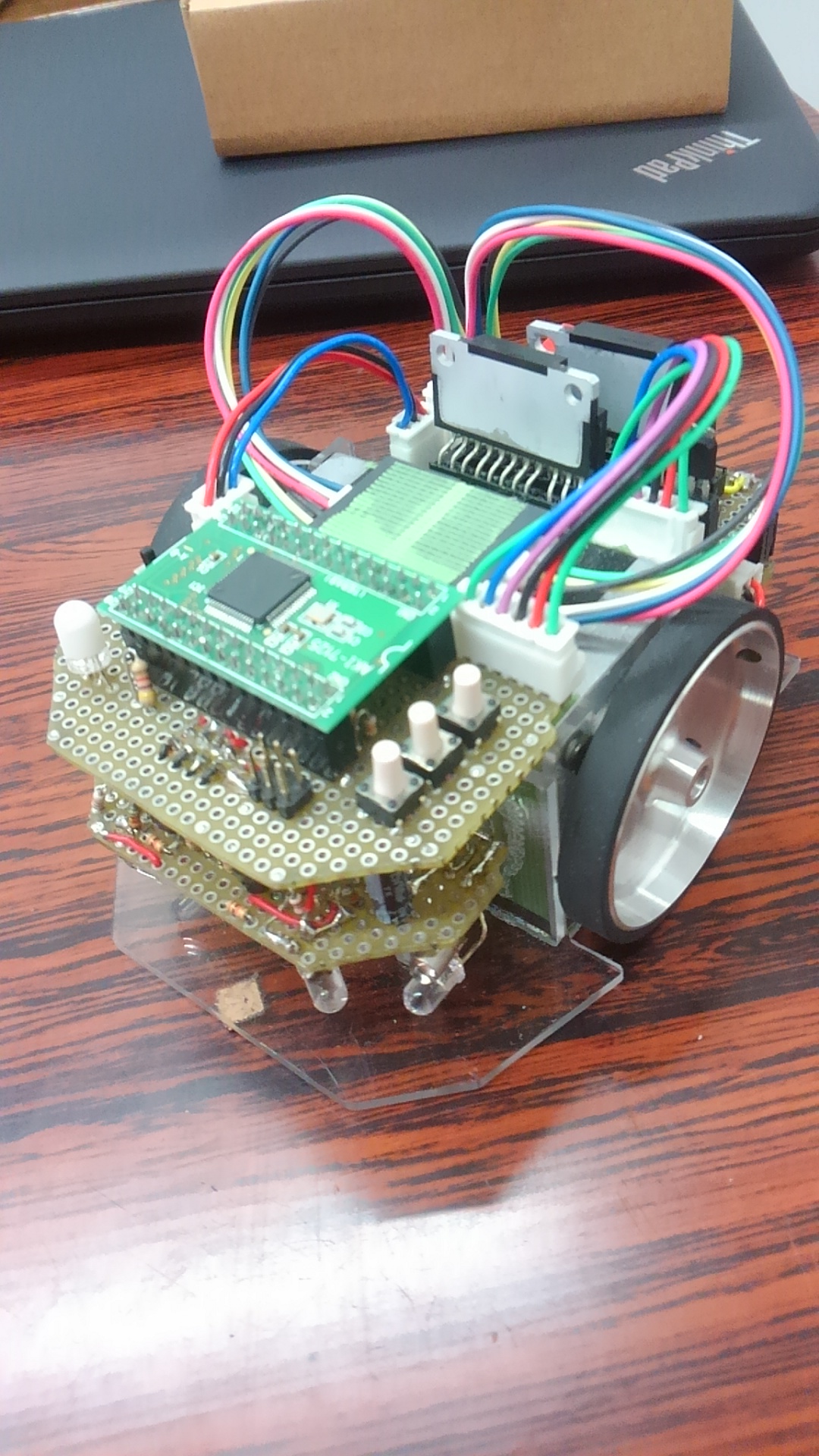
4輪ステッパ(仮)
| 機体名 | 4輪ステッパ(仮) |
|---|---|
| 製作期間 | 全部で2〜3週間くらい? |
| 使用マイコン | RX62T(64pin) |
| 電源 | Lipo 3Cell 2個(直列) |
| ギア |
M0.5 Z25 M0.5 Z40 減速比 0.625 |
| 特徴 |
2014年度シーズンに作った二作目です。 ステッパ2台目の製作、DCマウスの"プレ"アートワークをしたこともあって、いろいろ設計および製作はスムーズに行きました。 仕様としては、ステッパ1台目と同様に、3CellのLipoを2個直列につないだ高電圧仕様です。 また、1台目が高速時の不安定性とグリップ力の不足が目立ってきたことから、その克服を目指して、変則四輪仕様となっております。 結果、ステッパとは思えないような加速性能と、高速時直進安定性を得ることができました。 しかし、問題もあり、変則四輪ゆえの再現性のなさには苦しめられました。また、ステッパという低速時に振動してしまうモーターを使っているにもかかわらずギアを使っているので、探索時に騒音がすごいマウスとなっております(笑) |
戦績
- 2014年 学生大会 サーキット部門 第5位 00:11:833(ステッパ最速)
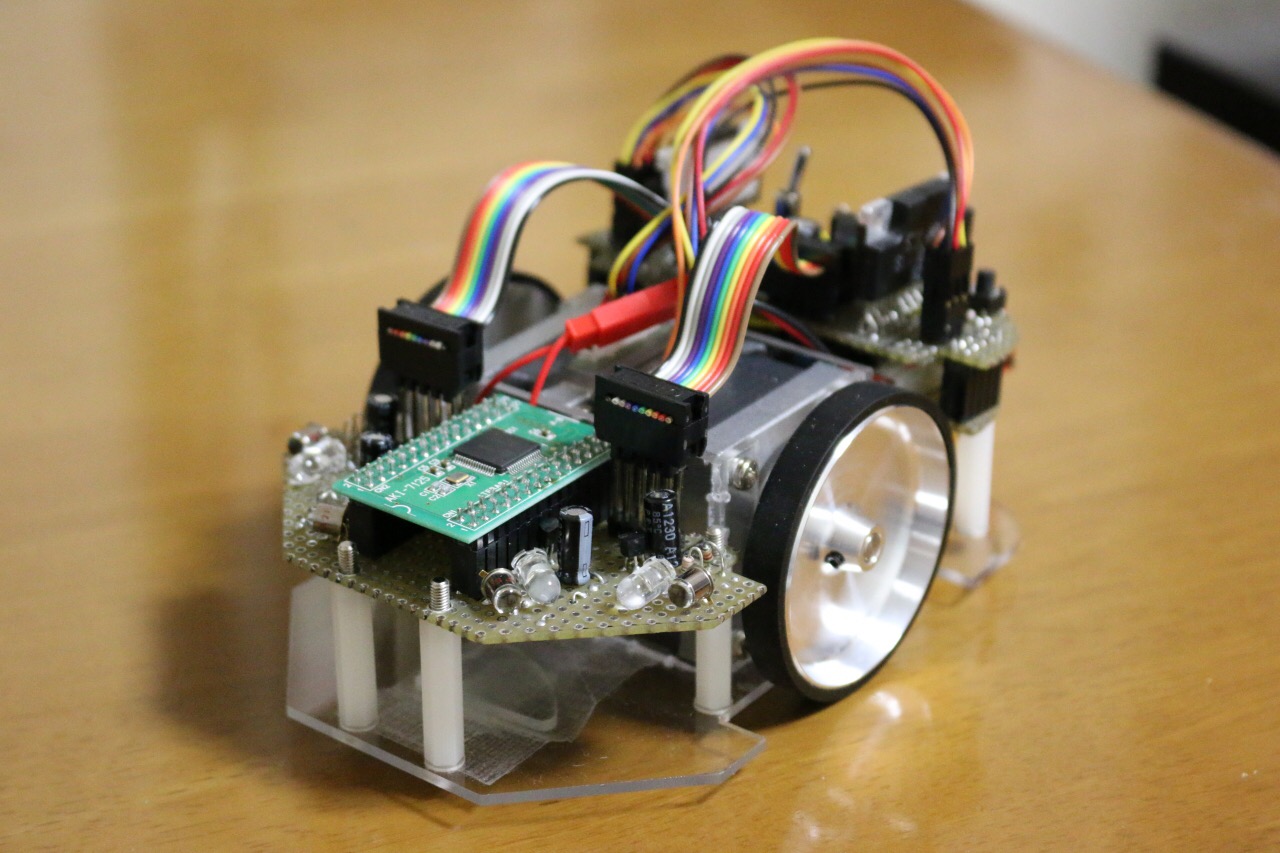
かに☆かま
| 機体名 | かに☆かま |
|---|---|
| 製作期間 | 約2年 |
| 使用マイコン | SH7125 |
| 設計思想 |
基板面積を広くとって、拡張性を高くする。 加えて、基板の形で独自性をだす。 |
| 最高速 |
各ターン700mm/s 直進3000mm/sくらい(台形加速) |
| 特技 | オートスタート |
| その他 |
ゴールしたり、死んだりしたりすると音楽が流れたり。 キラキラネームと煌々と輝くピンク色が売りです。 |
戦績
- 2014年全日本フレッシュマンクラシッククラス 第3位
エリプス

| 機体名 | エリプス |
|---|---|
| 製作期間 | 15ヶ月 |
| 使用マイコン | SH7125 |
| 特徴 |
モチーフは楕円。そして細かな工夫をコツコツと。 持ち主と共に大会に近づけば近づくほど身を滅ぼし合っていく運命にあった。 学生大会において特別賞を獲得したのでそこそこ役目は果した。 さらに詳しい機体情報はこちら |
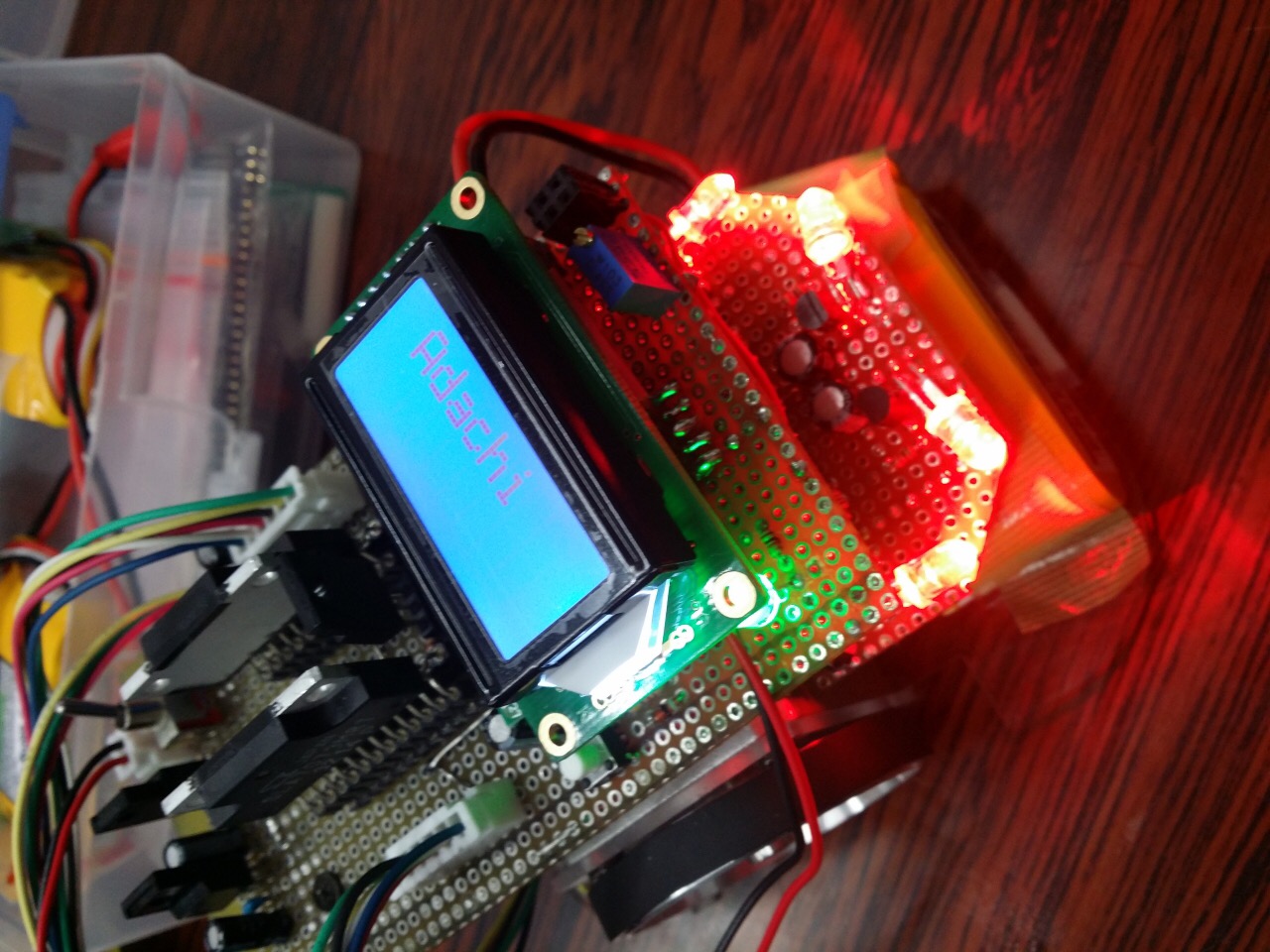
Squareネズミ
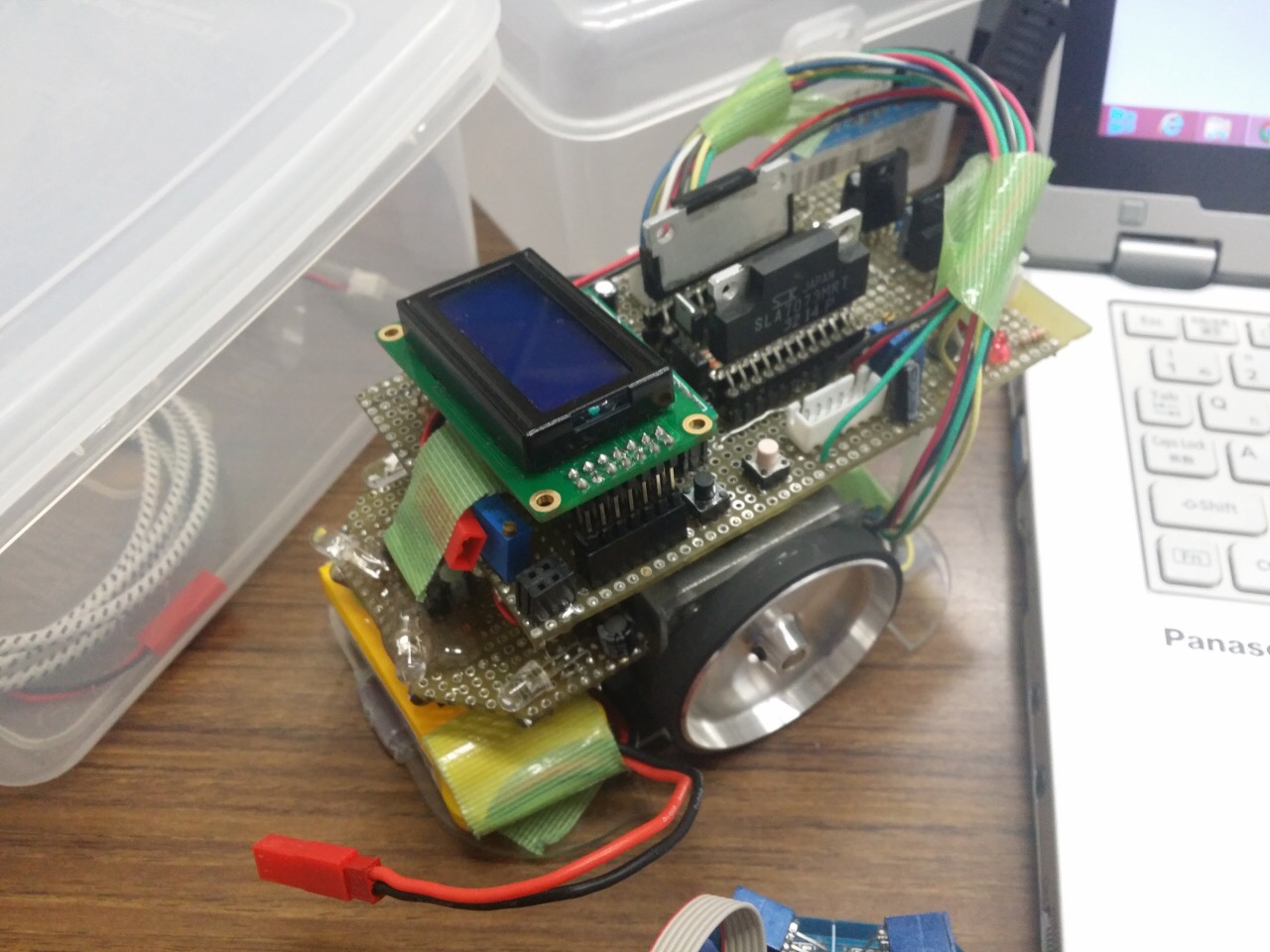
| 機体名 | Squareネズミ |
|---|---|
| 製作期間 | 1ヵ月半(機体完成まで1ヵ月) |
| 使用マイコン | SH7125 |
| 最高速度 | 2500mm/s |
| 特徴 |
最初は、たまご型マウスを作る予定が、気がつくとメインの基板が四角くなっていました… 行き当たりばったりに制作していたので、こういうことになりました。 あとは、LCD搭載なので、文字が表示できます。 |
| 苦労した点 |
2014年の東北大会に行ったときに遠征先でマイコンのROMが破損するという不慮の事故のようなことが起きましたが、予備を持っていた先輩のおかげで大会に出場でき、この大会ではじめて完走できました。 圧着が苦手なので、圧着した箇所が接触不良を多発(当時の部長に「もう圧着やってあげるよ」とまで言われました) 制作者が1年生のとき長万部に行っていた関係で2年生からMiceに入りましたが、2年生で大会に出場したため、製作期間が短いので、睡眠時間を削ってがんばりました。 |
| エピソード | それまでよく使われていたLEDが入手できなかったので、すごく明るいLEDを付けたら、まぶしいとよく言われました。 |
うむ夫。
| 機体名 | うむ夫。 |
|---|---|
| 製作期間 | 7ヵ月 |
| 使用マイコン | SH7125 |
| 特徴 | 王蟲の中の人(予定)。機能に関してはスタンダードです。 |
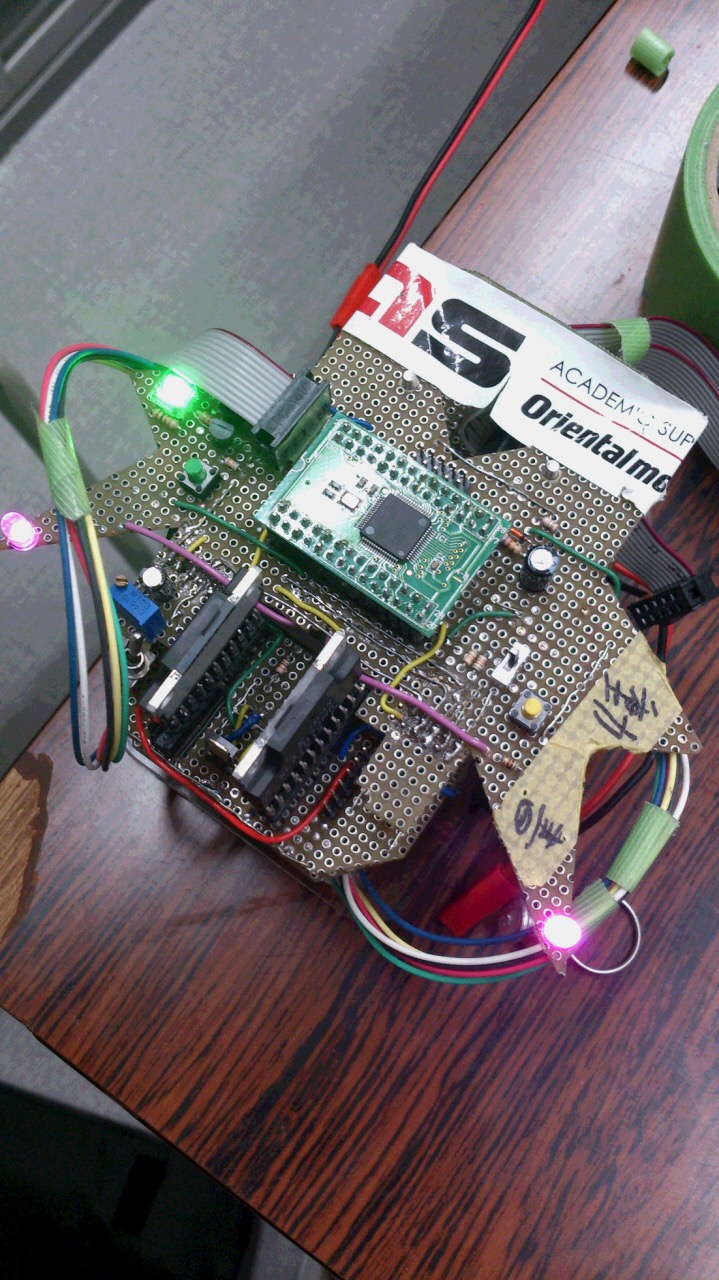
半田ディザスター

| 機体名 | 半田ディザスター |
|---|---|
| 製作年度 | 2018年 |
| 特徴 | でかい、きれいな緑7セグ、半田クラックが起きそうな半田付け、モータを3個、モータドライバを5個破壊した破壊神 この機体の名は半田ディザスター 「壊した分強くなる」を信条に ダカラトイッテミンナコワサナイデネ |
戦績
- 2018年東北地区大会フレッシュマン 準優勝
2018年マイクロマウス東日本記録会 3位?
2018年全日本マイクロマウス大会 完走
くらげ

| 機体名 | くらげ |
|---|---|
| 製作年度 | 2019年 |
| 特徴 | まんまるボディ!! |
くろくま
| 機体名 | くろくま |
|---|---|
| 製作年度 | 2022年 |
| 特徴 | 機体名の由来は熊ではなくハムスターでクロクマハムスターという種類がありそこから名付けました。 今はのそのそと熊みたいに動いていますが(熊に失礼)ハムスターのように素早くなりたいです。 |
戦績
- 2022年北陸信越地区大会 完走
- 2022年東北地区大会フレッシュマン 優勝
- 2022年全日本学生大会 5位 特別賞 00:12.472
- 2022年全日本大会 13位 特別賞 0:21.360
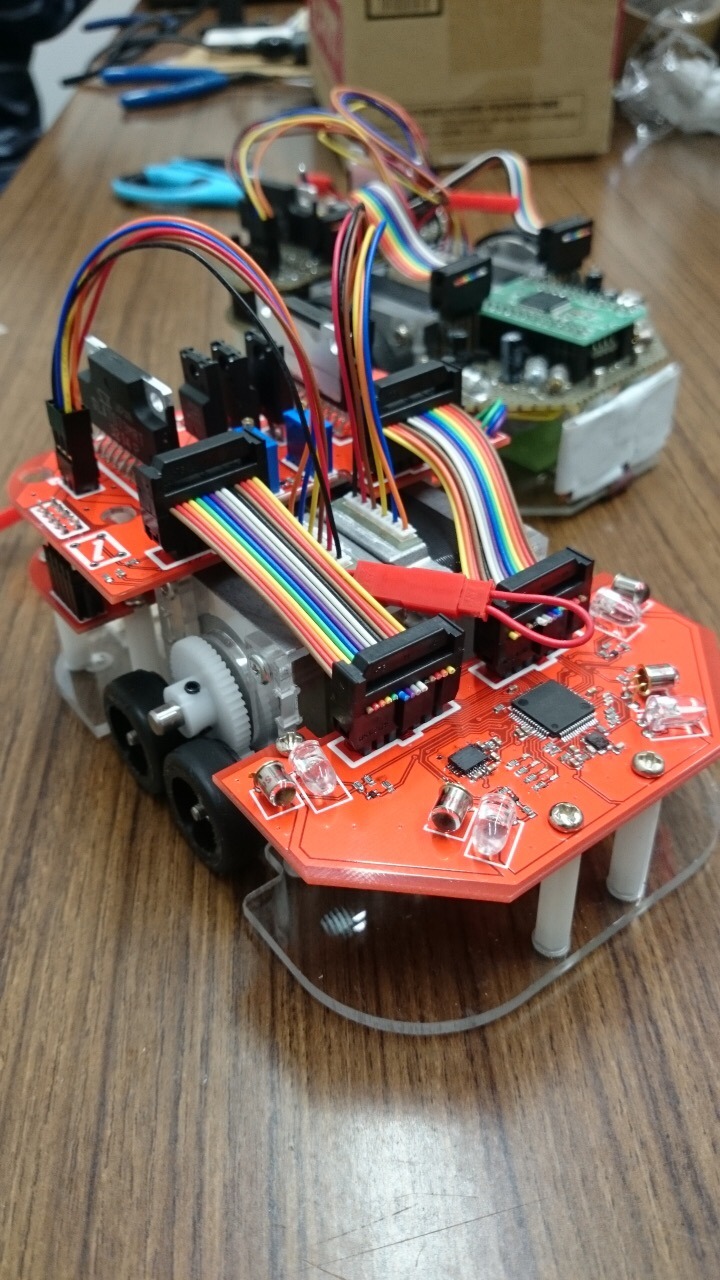
べこまうす

| 機体名 | べこまうす |
|---|---|
| 製作年度 | 2022年 |
| 特徴 | ステッパー最速目指します! |
戦績
- 2022年北陸信越地区大会 完走
- 2022年東北地区大会フレッシュマン 準優勝
- 2022年中部地区大会 6位 特別賞
- 2022年全日本学生大会 4位 00:09.651
- 2022年全日本大会 9位 特別賞 00:19.089
ロボットン
| 機体名 | ロボットン |
|---|---|
| 製作年度 | 2022年 |
| 特徴 | 機体名の由来はどっしりしていて強そうだから。既に一回逆挿しして壊しているので、なんとか修理して大会に出してあげたいです... |
戦績
- 2022年全日本大会 10位 0:19.289
満身創痍弐号
| 機体名 | 満身創痍弐号 |
|---|---|
| 製作年度 | 2022年 |
| 特徴 | 初心者あるあるをほぼ網羅した機体。壊した数だけ強くなる...はずだった... |
戦績
- 学生大会 5R
- オンライン認定大会 完走
- 全日本大会 5R
CuriousでPersevereなM
| 機体名 | CuriousでPersevereなM |
|---|---|
| 製作年度 | 2022年 |
| 特徴 | 特にありませんが、FETとコンデンサーが焼けました。先輩の基板なので僕が変なプログラムを書かなければ、超安定です。
完走を夢見ています。。。 →完走はする(粘り強い)が、マス目の多い迷路では配列がオーバーフローして最短走行不可(欠陥)見た目はロボットンに激似 |
戦績
- 2022年全日本大会 30位 1:11.655
クラシックDCマウス
ハセシュマウス ver.3.0

| 機体名 | ハセシュマウス ver.3.0 |
|---|---|
| サイズ | 115.5mm x 79mm x 48mm |
| 重量 | 135g |
| 詳細 | 詳細はこちらからどうぞ。 |
白鑞鴉

| 機体名 | 白鑞鴉(シロメカラス) |
|---|---|
| 製作年度 | 2018年~2022年 |
| エピソード | 吸引にこだわり過ぎて走りませんでした。今年は安定性目指して頑張ります。 |
戦績
- 2022年東日本大会クラッシック 4位
- 2022年全日本学生大会クラッシック 優勝 00:03.791
- 2022年全日本大会クラッシック 完走
ハーフマウス
ライントレースカー
新入生用
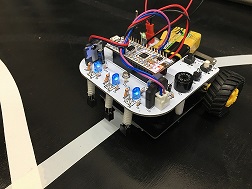
| 使用マイコン | STML432KC |
|---|---|
| 特徴 | Miceに入部してくれた新入生が最初に作るロボットです |
| その他 | マイコンはSTマイクロエレクトロニクス社様のユニバーシティ・プログラムでご提供いただいたものを使用しています。ありがとうございます。 |
その他
Cresthead
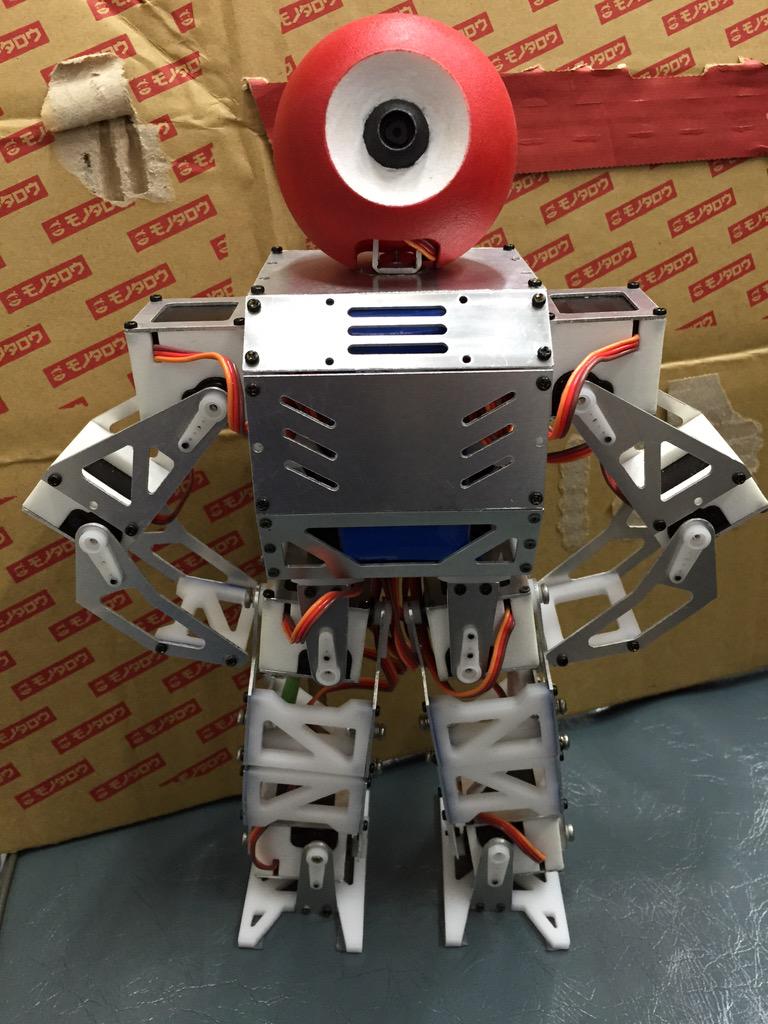
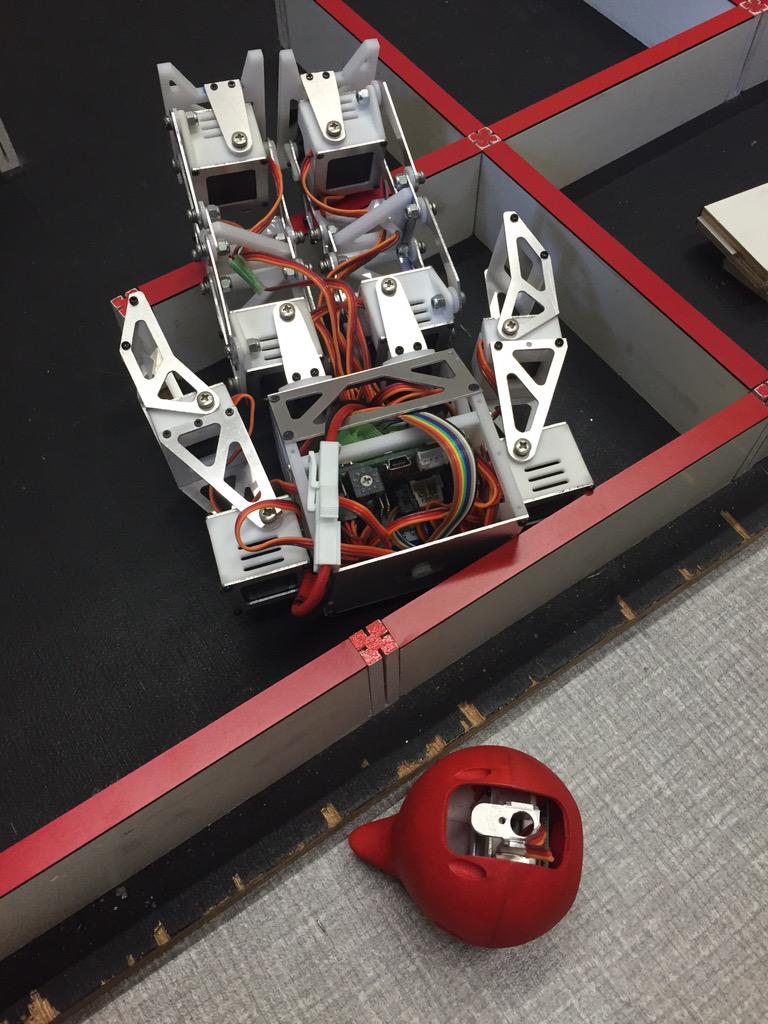
| 名前 | Cresthead |
|---|---|
| 重量 | 650g |
| 自由度 | 18 |
| プロセッサー | RaspberryPi(予定) |
| 特技 | 首が取れる |
| 製作期間 | 製作中 |
| 備考 | Miceのマスコット目指して修行中! |
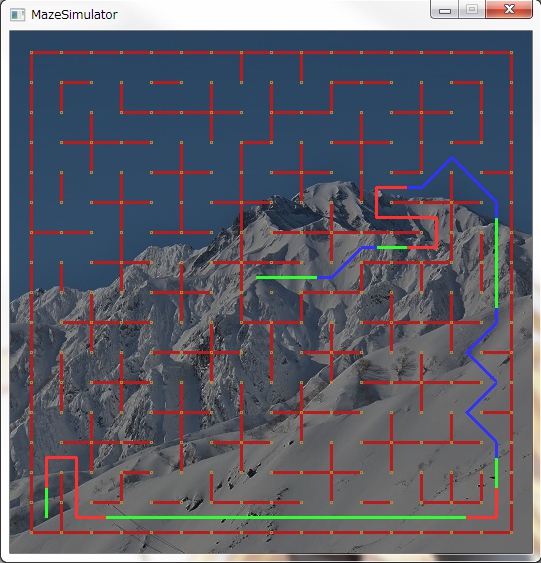
迷路シミュレータ
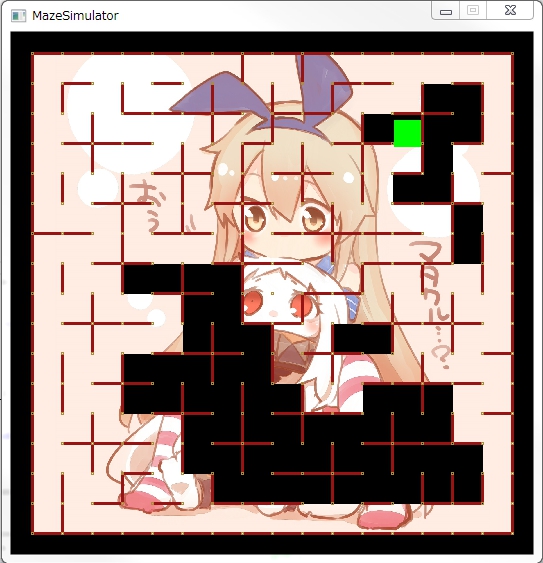
| ソフトウェア名 | 迷路シミュレータ |
|---|---|
| 機能 | ・探索経路解析 ・最短経路解析 ・全経路解析 |
| 開発環境 | Win7 64bit Visual Studio Express 2013 DXライブラリ |
| 製作期間 | 2週間 |
| 特徴 |
このシミュレータは、壁紙を自由に変えることができます! お気に入りのイラストでも写真でも。 探索経路解析では、壁情報を取得できた区画のみ背景を表示して、どのように探索するか視覚的にわかりやすくしています。 見た目には現れませんが、プログラムの工夫で、マウスのプログラムをそのままコピペで動くような仕様となっています。 |
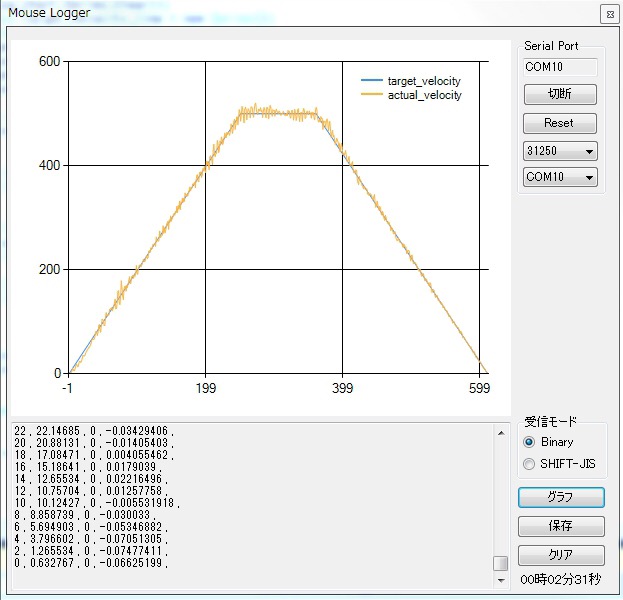
マウスロガー
| ソフトウェア名 | マウスロガー |
|---|---|
| 機能 |
・マウスとPCのシリアル通信 ・シリアル通信で取得した値のグラフ化 |
| 開発環境 | Win7 64bit Visual Studio Express 2013 |
| 使用言語 | C# |
| 製作期間 | 3日 |
| 特徴 |
DCマウスの製作には、ジャイロやエンコーダから取得した情報を見ることが重要です。 TeraTermでシリアル通信により取得した情報をエクセルにコピペし、グラフ化するのは手間がかかるので、シリアル通信からグラフ化まで一環して行えるアプリケーションがあると便利です。 このアプリは、現在PCに接続されているCOMポートからシリアル通信するポートを選び、マウスのシリアル通信を行い、取得した値をグラフ化する機能を持っています。 |